<?xml version="1.0" standalone="yes"?>
præsentation
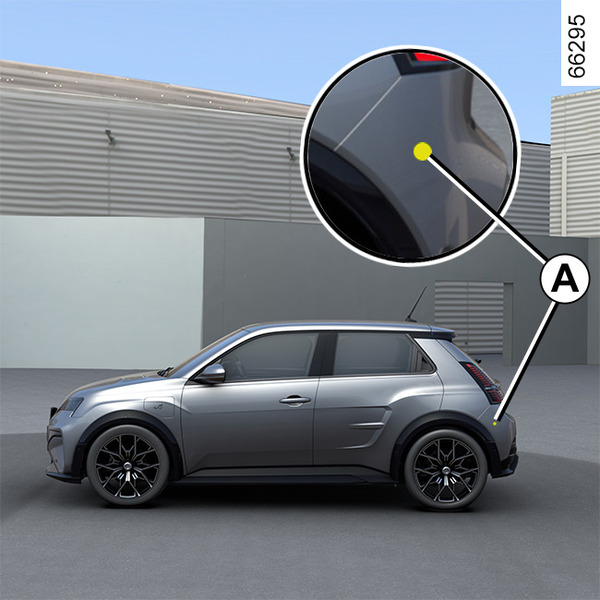
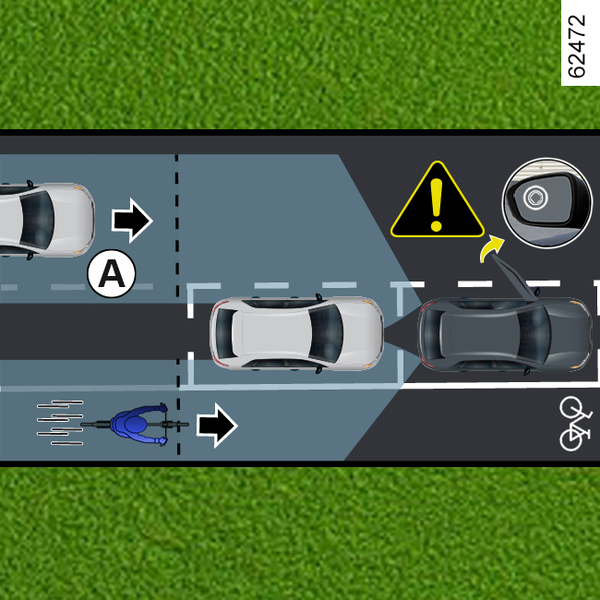
Ved hjælp af oplysninger fra de radarer, der er installeret på hver side af bagkofangeren (zone A), advarer systemet føreren, når et andet køretøj vises i registreringszonen B.
Funktionen aktiveres, hvis: